설명
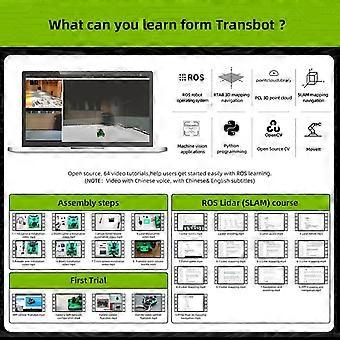
ROS Robot Tank with Lidar for SLAM Mapping, ROS Python Programming and Research Platform
Robotic Crawler Platform for Development, Research, and Remote Operation
Key benefits
Ready for development and prototyping: Integrates with Python and ROS ecosystems to accelerate testing, simulation, and deployment.
Reliable sensing and mapping: SLAM lidar together with HD and depth cameras enables accurate localization, obstacle detection, and environment mapping.
Durable, lightweight chassis: Green aluminum alloy oxide construction provides a rigid, corrosionresistant frame with a compact footprint for indoor and outdoor use.
Strong mobility and payload capability: torque gear motors deliver steady traction and precise motion for traversing uneven surfaces and carrying sensors or a lightweight manipulator.
Flexible control options: Operate the robot through a mobile app, a handheld controller for FPV operation, or directly program it online via JupyterLab.
Realworld simulation and arm control: Full support for ROS tools including Rviz, MoveIt, and Qt toolboxes for motion planning, visualization, and simulated testing before deployment.
Features and performance
Chassis: Crawler tank design for stability and low ground pressure; compact and portable for laboratory and field tasks.
Material: Anodized aluminum alloy oxide in green finish for a professional look and durable protection against wear.
Sensors: SLAMcapable lidar combined with HD camera and depth camera for fused perception, mapping, and object detection.
Actuation: torque gear motors tuned for continuous operation and precise speed control.
Control electronics: Powerful robot expansion board for advanced I O, sensor integration, and realtime control.
Software compatibility: Native integration with Python and ROS frameworks; works with Rviz for visualization, MoveIt for robotic arm planning, and Qt toolboxes for custom GUIs.
Why this platform solves common problems
Reduces integration time by with the sensors and expansion board needed for mapping, perception, and actuation, so teams can focus on algorithms and applications.
Improves safety in development through simulation toolchains that mirror real hardware behavior, cutting down trialanderror on the physical robot.
Supports multiple workflows: remote operation for field inspection, direct controller use for teleoperation, and programmatic access for automated experiments and education.
Practical applications and use scenarios
1) Indoor mapping and inspection: Use SLAM lidar and depth sensing to build accurate floor plans and inspect confined spaces. Control via mobile app for quick manual surveys or run autonomous mapping missions scripted in Python and ROS.
2) Manipulation research and training: Combine the platform with a lightweight robotic arm and use MoveIt and Rviz to develop and validate pick and place routines. Simulate motions with Qt interfaces before executing on hardware.
3) Remote monitoring and demonstration: Deploy the crawler for FPV exploration or live demonstrations using handheld control, while instructors or operators run JupyterLab sessions to modify behaviors and collect data in real time.
Compatibility and integration notes
Designed for ROS and Python development workflows and compatible with common ROS toolboxes for visualization, planning, and GUI development.
Expansion board provides standard interfaces for additional sensors, actuators, and custom peripherals.
Compact form factor fits laboratory workspaces and portable fieldkits.
What you get
A rugged crawler platform built from aluminum alloy oxide with integrated SLAM lidar, HD and depth cameras, torque gear motors, and a powerful robot expansion board ready for ROS and Python development.
Multiple control modes including mobile app, handheld FPV controller, and JupyterLab online programming for flexible deployment and testing.
This platform is suited for researchers, educators, developers, and hobbyists who need a robust, sensorrich crawler for mapping, manipulation, teleoperation, and rapid prototyping.
-
Fruugo ID:
464691955-977233987
-
EAN:
6119562009483