설명
Robot Tank with Lidar for SLAM Mapping, AI Vision, Python ROS Integration, Tracked Mobility Kit
Robust crawler robot tank designed for development, research, and field testing. The chassis is finished in green aluminum alloy oxide for a durable, lightweight shell and low center of gravity mobility suitable for tracked movement and modular sensor payloads.
Key benefits
Reliable mobility for varied terrain: tracked crawler design provides stable traction and a platform for sensors and manipulators.
Accurate perception and mapping: SLAM lidar plus HD and depth cameras enable realtime mapping, obstacle detection, and depthaware vision.
Strong actuation and expandability: torque gear motors deliver controlled movement while an onboard robot expansion board supports additional modules and I O.
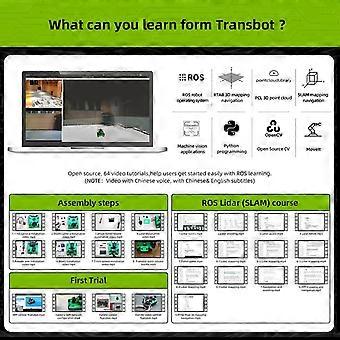
Flexible development and simulation: native Python and ROS compatibility with Rviz, Movelt, and Qt toolboxes for robotic arm control and realistic environment simulation.
Multiple control options: operate from a mobile app, a handle controller for firstpersonview effects, or program online through JupyterLab for remote experiments.
Core features
Chassis material: green aluminum alloy oxide for a balance of durability and light weight.
Perception suite: SLAM lidar for mapping, HD camera for detailed imaging, and depth camera for 3D sensing.
Drive system: torque gear motors designed for precise lowspeed control and reliable crawler movement.
Expansion and I O: powerful onboard robot expansion board to connect actuators, sensors, and custom modules.
Software toolchain: preconfigured for Python and ROS with Rviz, Movelt, and Qt toolboxes to support simulation, planning, and arm control workflows.
Control modes: mobile application control, handle controller for FPV teleoperation, and JupyterLab for online programming and data analysis.
Compatibility and integration
Works with standard ROS toolchain components and Python development environments.
Supports realworld simulation to match physical testing using Rviz and Movelt toolboxes.
Modular hardware interfaces enable integration of additional sensors, manipulators, and communication modules via the expansion board.
Practical use scenarios
Indoor mapping and inspection: perform autonomous SLAMbased mapping of warehouses, labs, and test sites while streaming HD and depth video for remote review.
Education and research: teach and prototype ROS navigation, manipulation, and perception algorithms using Rviz, Movelt, and JupyterLab workflows.
Remote teleoperation and prototyping: use the handle controller and mobile app for FPV exploration, then attach manipulators and develop arm control sequences in simulation and on the physical platform.
What this product solves
Provides a ready platform to develop and validate robotics algorithms without building a chassis from scratch.
Combines mapping, vision, and mobility so teams can focus on software and application development.
Offers multiple control and programming interfaces to fit development, teaching, and field deployment needs.
Who this is for
Robotics developers and integrators needing a versatile, sensorready mobile base.
Universities and labs teaching ROS, perception, and manipulation.
Prototype teams requiring a stable platform for teleoperation, mapping, and arm experiments.
Technical highlights at a glance
Material: green aluminum alloy oxide
Mobility: crawler tank chassis with torque gear motors
Sensors: SLAM lidar, HD camera, depth camera
Electronics: onboard robot expansion board for additional modules
Software: Python and ROS compatibility with Rviz, Movelt, and Qt toolboxes
Control options: mobile app, handle controller for FPV, JupyterLab online programming
The design balances durability, sensing capability, and developerfriendly software integration to accelerate robotics development and practical testing.
-
Fruugo ID:
460142284-968526446
-
EAN:
6119562023434