설명
Digital Stepper Driver 2 Phase Stepper Motor Controller 8 Level Current 16 Subdivision 20‑50VDC
Item Type: Stepper Motor Driver
Material: ABS, aluminum alloy
Cooling Method: Natural cooling or forced air cooling
Use Environment: Can not be placed next to other heating equipment, avoid dust, oil mist, corrosive gas, high humidity and strong vibration places, prohibit flammable gas and conductive dust
Temperature: 0-50℃
Humidity: 40-90%RH
Vibration: 10-55Hz/0.15mm
Storage Temperature: -20-65℃
Parameter
Minimum
Typical
Maximum
Output Current (peak)
2.1A
5.6A
Input Power Voltage
20VDC
24/36VDC
50VDC
Control Signal Input Current
7mA
10mA
16mA
Step Pulse Frequency
0KHz
200KHz
Insulation Resistance
100MΩ
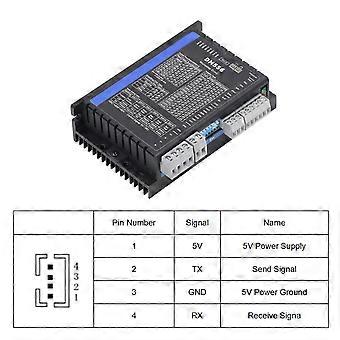
Wiring Requirements
1) In order to prevent the driver from being interfered, it is recommended e shielded cables for the control signal, and the shielding layer is short-circuited with the ground wire. Except for special requirements, the shielded wire of the control signal cable is grounded at one end: the upper computer end of the shielded wire is grounded, and the shielded wire is grounded at one end. One end of the driver is left open. The same machine is only allowed to be grounded at the same point. If it is not a real ground wire, the interference may be serious, and the shielding layer is not connected at this time.
2) The pulse and direction signal wires and the motor wires are not allowed to be bundled side by side, preferably at least 10cm apart, otherwise the motor noise will easily interfere with the pulse direction signal, resulting in inaccurate motor positioning and system instability.
3) If one power supply supplies multiple drives, it should be connected in parallel at the power supply, and it is not allowed to connect to one drive first and then to the other drive.
5) It is strictly forbidden to connect the wire head to the terminal after tinning, otherwise the terminal may be damaged by overheating due to the increase of the contact resistance.
6) The wiring head should not be exposed outside the terminal to prevent accidental short circuit and damage to the driver.
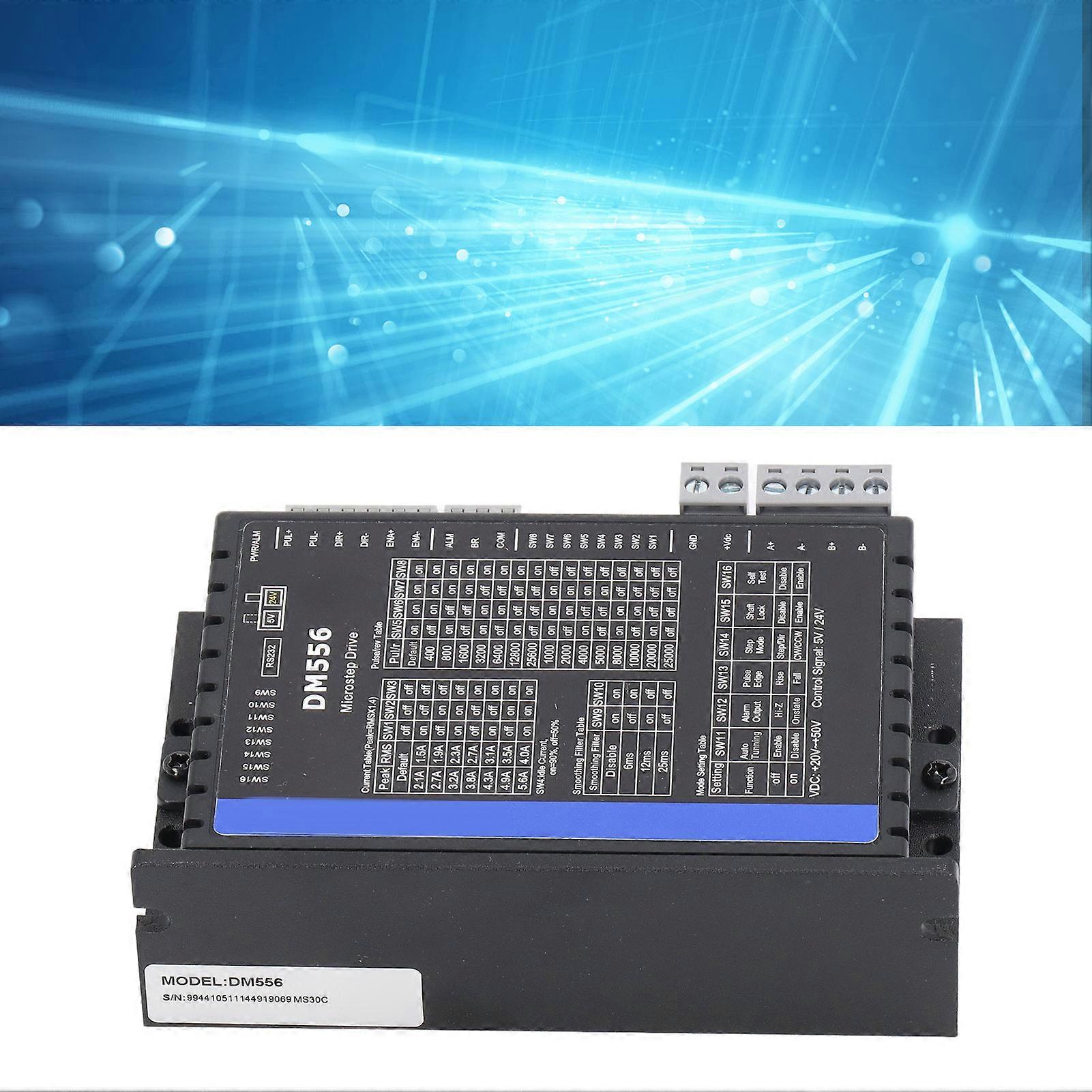
1. Setting of Supply Voltage
Vibration will be greater for slow motion.
2. Setting Value of Output Current
For the same motor, when the current setting value is larger, the output torsion of the motor is larger, but when the current is larger, the output of the motor and the driver will be larger.
Heat is also more serious. The size of the specific calorific value is not only related to the current setting value, but also related to the type of exercise and the dwell time.
The following setting methods use the rated current value of the stepper motor as a reference, but the best value in practical applications should be adjusted on this basis
all. In principle, if the temperature is very low (<40°C), the current setting value can be appropriately increased as needed to increase the motor output power (torsion).
and high speed response).
4 Wire Motor: The output current is set to be equal to or slightly less than the rated current value of the motor;
6 Wire Motor High Torsion Mode: The output current is set to 50% of the rated current of the motor unipolar connection;
6 Wire Motor High Speed Mode: The output current is set to 100% of the rated current of the motor unipolar connection;
8 Wire Motor Series Connection Method: The output current can be set to 70% of the rated current of the motor unipolar connection method;
8 Wire Motor Parallel Connection Method: The output current can be set to 140% of the rated current of the motor unipolar connection method.
-
Fruugo ID:
412579497-872316615
-
EAN:
8491336065580