설명
AI Vision Robot Tank Kit with Lidar, ROS Python Compatible for Autonomous Mapping and HD Depth Vision
A compact, durable crawler platform built from green aluminum alloy oxide and engineered for reliable field use and development.
Key benefits
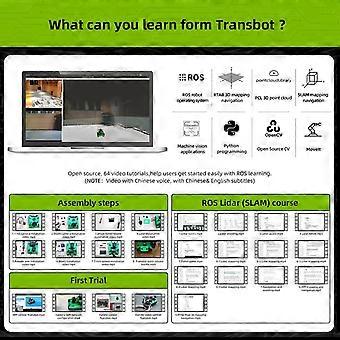
Ready for mapping and autonomy: Integrated SLAM lidar enables accurate simultaneous localization and mapping for autonomous navigation and environment awareness.
Precise perception and depth sensing: HD camera and depth camera provide resolution video and depth data for obstacle avoidance, object detection, and 3D reconstruction.
Strong drive performance: torque gear motors deliver reliable traction and stable movement across varied surfaces.
Expandable development platform: Includes a powerful robot expansion board for sensor and actuator integration, accelerating prototyping and custom upgrades.
Softwarefirst workflow: Full support for Python and ROS lets developers move from simulation to hardware with the same tools, shortening development cycles.
Flexible control options: Operate the robot from a smartphone app, a handheld controller for FPV operation, or through JupyterLab for online programming and experiments.
Key features
Chassis and material: Robust crawler design constructed from green aluminum alloy oxide for a balance of strength and weight.
Sensing: SLAM lidar plus HD and depth cameras for comprehensive environment perception and mapping.
Actuation: torque gear motors tuned for crawler mobility and payload handling.
Expansion and I O: Onboard robot expansion board for connecting additional sensors, manipulators, and peripherals.
Software toolchain: Compatible with ROS toolboxes including Rviz, Movelt, and Qt for robotic arm control and realworld simulation. Native Python support enables scriptable control and data processing.
Control interfaces: Mobile app control, handle control for immersive FPV effects, and JupyterLab online programming for interactive development.
Why this product solves common problems
Reduces integration overhead by providing a unified hardware platform with preselected sensors and a ready expansion board.
Shortens development time by supporting standard ROS visualization and motion planning tools, enabling direct testing in simulation and on the robot.
Improves reliability in testing and field tasks through durable materials and torque motors, minimizing downtime from component failure.
Offers flexible control paths to suit different workflows—field operators, remote pilots, and researchers can each use the interface that fits their needs.
Compatibility and performance notes
Works with Python and ROS toolchains and supports ROS toolboxes Rviz, Movelt, and Qt for simulation and arm control.
Designed for development, research, education, inspection, and remote operation workflows that require onboard sensing, mapping, and programmatic control.
Physical specifications emphasize a compact crawler form factor and aluminum alloy oxide construction for strength; detailed mechanical dimensions and payload limits are available in technical materials.
Practical use scenarios
Autonomous mapping and inspection: Use SLAM lidar and depth sensing to create indoor maps, inspect facilities, or survey structured environments while navigating autonomously.
Robotics education and prototyping: Students and developers can prototype perception and manipulation workflows in ROS and Python, test in Rviz and Movelt, and deploy directly to the crawler for realworld validation.
Remote FPV operation and reconnaissance: Deploy the robot for remote visual inspection or situational awareness with handheld controller FPV operation and HD video streaming.
What makes it stand out
Integrated sensor suite and expansionfocused hardware reduce the time from concept to testing.
Standard ROS and Python compatibility enable reuse of existing packages and workflows for visualization, motion planning, and control.
Durable aluminum alloy oxide construction paired with torque motors provides a reliable base for extended development and field tasks.
Includes
Crawler platform with green aluminum alloy oxide chassis
SLAM lidar, HD camera, and depth camera
torque gear motors
Onboard robot expansion board
Support for Python, ROS, Rviz, Movelt, and Qt toolboxes
Mobile app control, handheld FPV control, and JupyterLab online programming support
This platform is intended for developers, educators, and operators who need a robust, sensorrich crawler that integrates with standard robotic software tools for rapid prototyping, mapping, and remote operation.
-
Fruugo ID:
462147484-972791380
-
EAN:
6091977191390